
线性代数
线性变换
每列代表一个基向量,行数代码这个基向量所张成空间的维度,二行三列表示二维空间的三个基向量。
-
二维标准基矩阵(单位矩阵):
$$ \begin{bmatrix} 1 & 0 \ 0 & 1 \end{bmatrix} = \begin{bmatrix} | & | \ \mathbf{i} & \mathbf{j} \ | & | \end{bmatrix} $$ -
三维标准基矩阵(单位矩阵):
$$ \begin{bmatrix} 1 & 0 & 0 \ 0 & 1 & 0 \ 0 & 0 & 1 \end{bmatrix} = \begin{bmatrix} | & | & | \ \mathbf{i} & \mathbf{j} & \mathbf{k} \ | & | & | \end{bmatrix} $$
矩阵乘向量
在 3blue1brown 的“线性代数的本质”系列中,他把矩阵乘向量的运算解释为线性组合和线性变换的过程。具体来说:
-
计算方法
给定一个 $ m \times n $ 的矩阵 $ A $ 和一个 $ n $ 维向量 $ \mathbf{x} = [x_1, x_2, \dots, x_n]^T $,矩阵与向量的乘积可以表示为: $$ A\mathbf{x} = x_1 \mathbf{a}_1 + x_2 \mathbf{a}_2 + \cdots + x_n \mathbf{a}_n $$ 其中,$\mathbf{a}_i$ 表示 $ A $ 的第 $ i $ 列向量。也就是说,我们用向量 $\mathbf{x}$ 的各个分量作为权重,对矩阵的各列进行线性组合。例如:矩阵 $ A $ 是一个二阶矩阵:
$$ A = \begin{bmatrix} a & b \ c & d \end{bmatrix} $$
向量 $ \mathbf{x} $ 是一个二维列向量:
$$ \mathbf{x} = \begin{bmatrix} x \ y \end{bmatrix} $$
可以将这个乘法看作是用 $ x $ 和 $ y $ 这两个数,分别对矩阵的两列向量进行加权:
$$ A\mathbf{x} = x \cdot \begin{bmatrix} a \ c \end{bmatrix} + y \cdot \begin{bmatrix} b \ d \end{bmatrix} $$
也就是说,矩阵乘向量的结果,是“矩阵每一列”乘以“向量中对应的分量”,再把它们加起来。
-
背后的思想
-
分解为基向量的组合:
任何向量都可以看作是标准基向量的线性组合。矩阵 $ A $ 在几何上代表了一个线性变换,而标准基向量在这个变换下会分别被映射到新的位置,也就是矩阵的各列。 -
构造变换:
当我们用 $\mathbf{x}$ 的分量对这些映射后的基向量加权求和时,就得到了 $ \mathbf{x} $ 在变换后的结果。这种方式不仅方便计算,而且直观地展示了线性变换如何“重塑”空间——每一列告诉我们基向量被如何移动,然后这些移动按比例组合出最终向量的位置。
-
矩阵乘矩阵
当你有两个矩阵 $ A $ 和 $ B $,矩阵乘法 $ AB $ 实际上代表的是:
先对向量应用 $ B $ 的线性变换,再应用 $ A $ 的线性变换。
也就是说:
$$ (AB)\vec{v} = A(B\vec{v}) $$3blue1brown 的直觉解释:
矩阵 B:提供了新的变换后基向量
记住:矩阵的每一列,表示标准基向量 $ \mathbf{e}_1, \mathbf{e}_2 $ 在变换后的样子。
所以:
- $ B $ 是一个变换,它把空间“拉伸/旋转/压缩”成新的形状;
- $ A $ 接着又对这个已经变形的空间进行变换。
例:
$$ A = \begin{bmatrix} 2 & 0 \\ 0 & 3 \end{bmatrix}, \quad B = \begin{bmatrix} 1 & -1 \\ 1 & 1 \end{bmatrix} $$- $ B $ 的列是:
- $ \begin{bmatrix} 1 \ 1 \end{bmatrix} $ → 第一个标准基向量变形后的位置
- $ \begin{bmatrix} -1 \ 1 \end{bmatrix} $ → 第二个标准基向量变形后的位置
我们计算:
- $ A \cdot \begin{bmatrix} 1 \ 1 \end{bmatrix} = \begin{bmatrix} 2 \ 3 \end{bmatrix} $
- $ A \cdot \begin{bmatrix} -1 \ 1 \end{bmatrix} = \begin{bmatrix} -2 \ 3 \end{bmatrix} $
所以:
$$ AB = \begin{bmatrix} 2 & -2 \\ 3 & 3 \end{bmatrix} $$这个新矩阵 $ AB $ 的列向量,表示标准基向量在经历了 “先 B 再 A” 的变换后,落在了哪里。
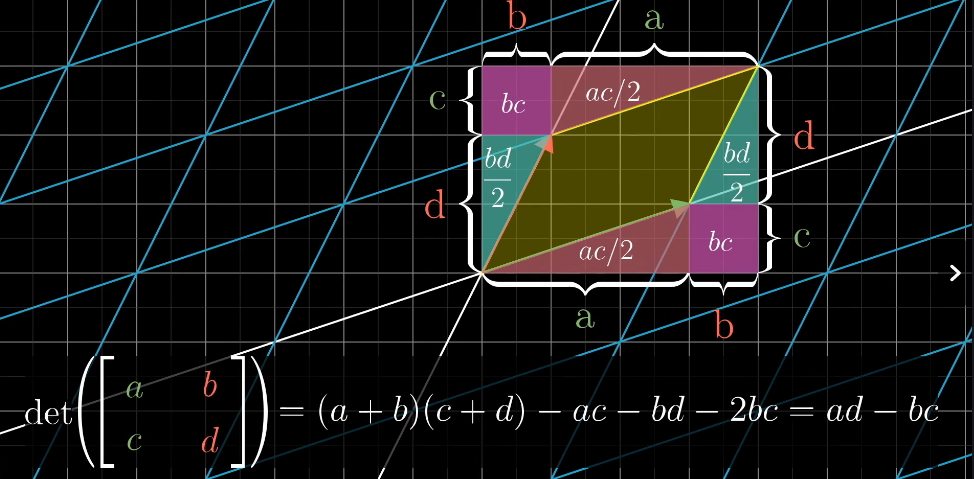
行列式
3blue1brown讲解行列式时,核心在于用几何直观来理解行列式的意义:
缩放比例!!!
体积(或面积)的伸缩因子 对于二维空间中的2×2矩阵,行列式的绝对值表示该矩阵作为线性变换时,对单位正方形施加变换后得到的平行四边形的面积。类似地,对于三维空间中的3×3矩阵,行列式的绝对值就是单位立方体变换后的平行六面体的体积。也就是说,行列式告诉我们这个变换如何“拉伸”或“压缩”空间。
方向的指示(有向面积或体积) 行列式不仅仅给出伸缩倍数,还通过正负号反映了变换是否保持了原来的方向(正)还是发生了翻转(负)。例如,在二维中,如果行列式为负,说明变换过程中存在翻转(类似镜像效果)。
变换的可逆性 当行列式为零时,说明该线性变换把空间压缩到了低维(例如二维变一条线,三维变成一个平面或线),这意味着信息在变换过程中丢失,变换不可逆。
逆矩阵、列空间、零空间
逆矩阵
逆矩阵描述了一个矩阵所代表的线性变换的**“反过程”**。假设矩阵 $A$ 对空间做了某种变换(比如旋转、拉伸或压缩),那么 $A^{-1}$ 就是把这个变换“逆转”,把变换后的向量再映射回原来的位置。
前提是$A$ 是可逆的,即它对应的变换不会把空间压缩到更低的维度。
秩
秩等于矩阵列向量(或行向量)所生成的空间的维数。例如,在二维中,如果一个 $2 \times 2$ 矩阵的秩是 2,说明这个变换把平面“充满”;如果秩为 1,则所有输出都落在一条直线上,说明变换“丢失”了一个维度。
列空间
列空间是矩阵所有列向量的线性组合所构成的集合(也可以说所有可能的输出向量$A\mathbf{x}$所构成的集合)。 比如一个二维变换的列空间可能是整个平面,也可能只是一条直线,这取决于矩阵的秩。
零空间
零空间(又称核、kernel)是所有在该矩阵作用(线性变换$A$)下变成零向量的输入向量的集合。
它展示了变换中哪些方向被“压缩”成了一个点(原点)。例如,在三维中,如果一个矩阵将所有向量沿某个方向压缩到零,那么这个方向构成了零空间。
零空间解释了$Ax=0$的解的集合,就是齐次的通解。如果满秩,零空间只有唯一解零向量。
求解线性方程
设线性方程组写作
$$ A\mathbf{x} = \mathbf{b} $$ 这相当于在问:“有没有一个向量 $\mathbf{x}$ ,它经过矩阵 $A$ 的变换后,恰好落在 $\mathbf{b}$ 所在的位置?”- 如果 $\mathbf{b}$ 落在 $A$ 的列空间内,那么就存在解。解可能是唯一的(当矩阵满秩时)或无穷多(当零空间非平凡时)。
- 如果 $\mathbf{b}$ 不在列空间内,则说明 $\mathbf{b}$ 不可能由 $A$ 的列向量线性组合得到,这时方程组无解。
- 唯一解对应于所有这些几何对象在一点相交;
- 无限多解对应于它们沿着某个方向重合;
- 无解则说明这些对象根本没有公共交点。
基变换
新基下的变换矩阵 $A_C$ 为:
$$ A_C = P^{-1} A P $$$P$:从原基到新基的基变换矩阵(可逆),$P$的每一列代表了新基中的一个基向量
$A$:线性变换 $T$ 在原基下的矩阵表示
原来空间中进行$A$线性变换等同于新基的视角下进行 $A_C$ 变换
点积、哈达马积
向量点积(Dot Product)
3blue1brown认为,两个向量的点乘就是将其中一个向量转为线性变换。
假设有两个向量
$$ \mathbf{v} = \begin{bmatrix} v_1 \\ v_2 \end{bmatrix}, \quad \mathbf{w} = \begin{bmatrix} w_1 \\ w_2 \end{bmatrix}. $$ $$ \mathbf{v} \cdot \mathbf{w} =\begin{bmatrix} v_1 & v_2 \end{bmatrix}\begin{bmatrix} w_1 \\ w_2 \end{bmatrix}=v_1w_1 + v_2w_2.. $$- 结果:
点积的结果是一个标量(即一个数)。 - 几何意义:
点积可以衡量两个向量的相似性,或者计算一个向量在另一个向量方向上的投影。
哈达马积(Hadamard Product)
-
定义:
对于两个向量 $\mathbf{u} = [u_1, u_2, \dots, u_n]$ 和 $\mathbf{v} = [v_1, v_2, \dots, v_n]$,它们的哈达马积定义为: $$ \mathbf{u} \circ \mathbf{v} = [u_1 v_1, u_2 v_2, \dots, u_n v_n]. $$ -
结果:
哈达马积的结果是一个向量,其每个分量是对应位置的分量相乘。 -
几何意义:
哈达马积通常用于逐元素操作,比如在神经网络中对两个向量进行逐元素相乘。
矩阵也有哈达马积!。
特征值和特征向量
设矩阵:
$$ A = \begin{bmatrix} 2 & 1 \\ 0 & 3 \end{bmatrix} $$步骤 1:求特征值
构造特征方程:
$$ \det(A - \lambda I) = \det\begin{bmatrix} 2-\lambda & 1 \\ 0 & 3-\lambda \end{bmatrix} = (2-\lambda)(3-\lambda) - 0 = 0 $$解得:
$$ (2-\lambda)(3-\lambda) = 0 \quad \Longrightarrow \quad \lambda_1 = 2,\quad \lambda_2 = 3 $$步骤 2:求特征向量
- 对于 $\lambda_1 = 2$: 解方程:
从第一行 $x_2 = 0$。因此特征向量可以写成:
$$ \mathbf{v}_1 = \begin{bmatrix} 1 \\ 0 \end{bmatrix} \quad (\text{任意非零常数倍}) $$- 对于 $\lambda_2 = 3$: 解方程:
从第一行得 $-x_1 + x_2 = 0$ 或 $x_2 = x_1$。因此特征向量可以写成:
$$ \mathbf{v}_2 = \begin{bmatrix} 1 \\ 1 \end{bmatrix} \quad (\text{任意非零常数倍}) $$设一个对角矩阵:
$$ D = \begin{bmatrix} d_1 & 0 \\ 0 & d_2 \end{bmatrix} $$ $$ \lambda_1 = d_1,\quad \lambda_2 = d_2 $$对角矩阵的特征方程为:
$$ \det(D - \lambda I) = (d_1 - \lambda)(d_2 - \lambda) = 0 $$因此特征值是:
$$ \lambda_1 = d_1,\quad \lambda_2 = d_2 $$- 对于 $\lambda_1 = d_1$,方程 $(D-d_1I)\mathbf{x}=\mathbf{0}$ 得到:
若 $d_1 \neq d_2$,则必须有 $x_2=0$,而 $x_1$ 可任意取非零值,因此特征向量为:
$$ \mathbf{v}_1 = \begin{bmatrix} 1 \\ 0 \end{bmatrix} $$- 对于 $\lambda_2 = d_2$,类似地解得:
矩阵乘法
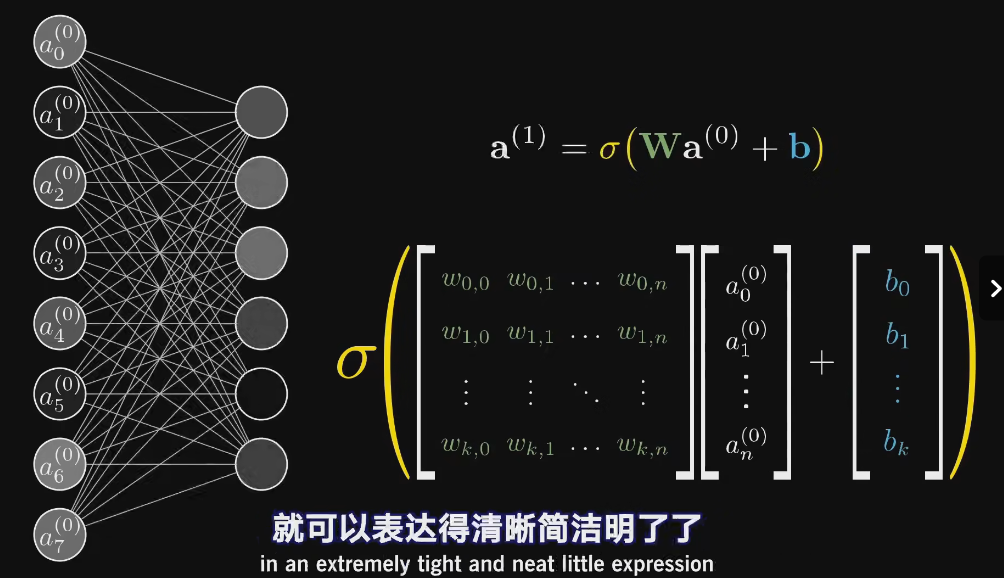
全连接神经网络
其中:
-
$a^{(0)}$ 是输入向量,表示当前层的输入。
-
$\mathbf{W}$ 是权重矩阵,表示输入向量到输出向量的线性变换。
-
$b$ 是偏置向量,用于调整输出。
-
$\sigma$ 是激活函数(如 ReLU、Sigmoid 等),用于引入非线性。
-
输入向量 $a^{(0)}$:
这是一个 $n+1$ 维的列向量,表示输入特征。
- 权重矩阵 $\mathbf{W}$:
这是一个 $k \times (n+1)$ 的矩阵,其中 $k$ 是输出向量的维度,$n+1$ 是输入向量的维度。
- 偏置向量 $b$:
这是一个 $k$ 维的列向量,用于调整输出。
- 在传统的连续时间 RNN 写法里,常见的是
这代表对所有神经元 $j$ 的激活 $\sigma(x_j)$ 做加权求和,再求和到神经元 $i$。
如果拆开来看,每个输出分量也都含一个求和 $\sum_{j}$:
- 输出向量的第 1 个分量(记作第 1 行的结果):
- 输出向量的第 2 个分量(第 2 行的结果):
- 在使用矩阵乘法时,你可以写成
其中 $\sigma$ 表示对 $x$ 的各分量先做激活,接着用 $W_r$ 乘上去。这就是把“$\sum_j \dots$”用矩阵乘法隐藏了。
$$ \begin{pmatrix} 0.3 & -0.5\\ 1.2 & \;\,0.4 \end{pmatrix} \begin{pmatrix} 2\\ 1 \end{pmatrix} = \begin{pmatrix} 0.3 \times 2 + (-0.5) \times 1\\[6pt] 1.2 \times 2 + 0.4 \times 1 \end{pmatrix} = \begin{pmatrix} 0.6 - 0.5\\ 2.4 + 0.4 \end{pmatrix} = \begin{pmatrix} 0.1\\ 2.8 \end{pmatrix}. $$奇异值
定义
对于一个 $m \times n$ 的矩阵 $A$,其奇异值是非负实数 $\sigma_1, \sigma_2, \ldots, \sigma_r$($r = \min(m, n)$),满足存在正交矩阵 $U$ 和 $V$,使得:
$$ A = U \Sigma V^T $$其中,$\Sigma$ 是对角矩阵,对角线上的元素即为奇异值。
主要特点
- 非负性:奇异值总是非负的。
- 对角矩阵的奇异值是对角线元素的绝对值。
- 降序排列:通常按从大到小排列,即 $\sigma_1 \geq \sigma_2 \geq \ldots \geq \sigma_r \geq 0$。
- 矩阵分解:奇异值分解(SVD)将矩阵分解为三个矩阵的乘积,$U$ 和 $V$ 是正交矩阵,$\Sigma$ 是对角矩阵。
- 应用广泛:奇异值在数据降维、噪声过滤、图像压缩等领域有广泛应用。
奇异值求解
奇异值可以通过计算矩阵 $A^T A$ 或 $A A^T$ 的特征值的平方根得到。
步骤 1:计算 $A^T A$
首先,我们计算矩阵 $A$ 的转置 $A^T$:
$$ A^T = \begin{pmatrix} 3 & 0 \\ 0 & -4 \end{pmatrix} $$然后,计算 $A^T A$:
$$ A^T A = \begin{pmatrix} 3 & 0 \\ 0 & -4 \end{pmatrix} \begin{pmatrix} 3 & 0 \\ 0 & -4 \end{pmatrix} = \begin{pmatrix} 9 & 0 \\ 0 & 16 \end{pmatrix} $$步骤 2:计算 $A^T A$ 的特征值
接下来,我们计算 $A^T A$ 的特征值。特征值 $\lambda$ 满足以下特征方程:
$$ \det(A^T A - \lambda I) = 0 $$即:
$$ \det \begin{pmatrix} 9 - \lambda & 0 \\ 0 & 16 - \lambda \end{pmatrix} = (9 - \lambda)(16 - \lambda) = 0 $$解这个方程,我们得到两个特征值:
$$ \lambda_1 = 16, \quad \lambda_2 = 9 $$步骤 3:计算奇异值
奇异值是特征值的平方根,因此我们计算:
$$ \sigma_1 = \sqrt{\lambda_1} = \sqrt{16} = 4 $$ $$ \sigma_2 = \sqrt{\lambda_2} = \sqrt{9} = 3 $$结果
矩阵 $A$ 的奇异值为 4 和 3。
奇异值分解
给定一个实矩阵 $A$(形状为 $m \times n$),SVD 是将它分解为:
$$ A = U \Sigma V^T $$-
构造 $A^T A$
- 计算对称矩阵 $A^T A$($n \times n$)
-
求解 $A^T A$ 的特征值和特征向量
- 设特征值为 $\lambda_1 \geq \lambda_2 \geq \dots \geq \lambda_n \geq 0$
- 对应特征向量为 $\mathbf{v}_1, \mathbf{v}_2, \dots, \mathbf{v}_n$
-
计算奇异值
- $\sigma_i = \sqrt{\lambda_i}$
-
构造矩阵 $V$
- 将正交归一的特征向量作为列向量:$V = [\mathbf{v}_1 | \mathbf{v}_2 | \dots | \mathbf{v}_n]$
-
求矩阵 $U$
- 对每个非零奇异值:$\mathbf{u}_i = \frac{A \mathbf{v}_i}{\sigma_i}$
- 标准化(保证向量长度为 1)后组成 $U = [\mathbf{u}_1 | \mathbf{u}_2 | \dots | \mathbf{u}_m]$
-
构造 $\Sigma$
- 对角线放置奇异值:$\Sigma = \text{diag}(\sigma_1, \sigma_2, \dots, \sigma_p)$,$p=\min(m,n)$
范数
L2范数定义:
对于一个向量 $\mathbf{w} = [w_1, w_2, \dots, w_n]$,L2 范数定义为
$$ \|\mathbf{w}\|_2 = \sqrt{w_1^2 + w_2^2 + \dots + w_n^2} $$假设一个权重向量为 $\mathbf{w} = [3, -4]$,则
$$ \|\mathbf{w}\|_2 = \sqrt{3^2 + (-4)^2} = \sqrt{9+16} = \sqrt{25} = 5. $$用途:
- 正则化(L2正则化/权重衰减):在训练过程中,加入 L2 正则项有助于防止模型过拟合。正则化项通常是权重的 L2 范数的平方,例如
其中 $\lambda$ 是正则化系数。
- 梯度裁剪:在 RNN 等深度网络中,通过计算梯度的 L2 范数来判断是否需要对梯度进行裁剪,从而防止梯度爆炸。
具体例子:
假设我们有一个简单的线性回归模型,损失函数为均方误差(MSE):
$$ L(\mathbf{w}) = \frac{1}{2N} \sum_{i=1}^N (y_i - \mathbf{w}^T \mathbf{x}_i)^2 $$ 其中,$N$ 是样本数量,$y_i$ 是第 $i$ 个样本的真实值,$\mathbf{x}_i$ 是第 $i$ 个样本的特征向量,$\mathbf{w}$ 是权重向量。加入 L2 正则项后,新的损失函数为:
$$ L_{\text{reg}}(\mathbf{w}) = \frac{1}{2N} \sum_{i=1}^N (y_i - \mathbf{w}^T \mathbf{x}_i)^2 + \lambda \|\mathbf{w}\|_2^2 $$在训练过程中,优化算法会同时最小化原始损失函数和正则项,从而在拟合训练数据的同时,避免权重值过大。
梯度更新
在梯度下降算法中,权重 $\mathbf{w}$ 的更新公式为:
$$ \mathbf{w} \leftarrow \mathbf{w} - \eta \nabla L_{\text{reg}}(\mathbf{w}) $$ 其中,$\eta$ 是学习率,$\nabla L_{\text{reg}}(\mathbf{w})$ 是损失函数关于 $\mathbf{w}$ 的梯度。对于加入 L2 正则项的损失函数,梯度为:
$$ \nabla L_{\text{reg}}(\mathbf{w}) = \nabla L(\mathbf{w}) + 2\lambda \mathbf{w} $$ 因此,权重更新公式变为: $$ \mathbf{w} \leftarrow \mathbf{w} - \eta (\nabla L(\mathbf{w}) + 2\lambda \mathbf{w}) $$通过加入 L2 正则项,模型在训练过程中不仅会最小化原始损失函数,还会尽量减小权重的大小,从而避免过拟合。正则化系数 $\lambda$ 控制着正则化项的强度,较大的 $\lambda$ 会导致权重更小,模型更简单,但可能会欠拟合;较小的 $\lambda$ 则可能无法有效防止过拟合。因此,选择合适的 $\lambda$ 是使用 L2 正则化的关键。
矩阵的元素级范数
L0范数(但它 并不是真正的范数):
$$ \|A\|_0 = \text{Number of non-zero elements in } A = \sum_{i=1}^{m} \sum_{j=1}^{n} \mathbb{I}(a_{ij} \neq 0) $$ 其中:- $\mathbb{I}(\cdot)$ 是指示函数(若 $a_{ij} \neq 0$ 则取 1,否则取 0)。
- 如果矩阵 $A$ 有 $k$ 个非零元素,则 $|A|_0 = k$。
-
衡量稀疏性:
- $|A|_0$ 越小,矩阵 $A$ 越稀疏(零元素越多)。
- 在压缩感知、低秩矩阵恢复、稀疏编码等问题中,常用 $L_0$ 范数来 约束解的稀疏性。
-
非凸、非连续、NP难优化:
-
$L_0$ 范数是 离散的,导致优化问题通常是 NP难 的(无法高效求解)。
-
因此,实际应用中常用 $L_1$ 范数(绝对值之和)作为凸松弛替代: $$ |A|1 = \sum{i,j} |a_{ij}| $$
-
NP难问题:
可以在多项式时间内 验证一个解是否正确,但 不一定能在多项式时间内找到解。
L1范数:元素绝对值和
$$ \|A\|_1 = \sum_{i=1}^{m} \sum_{j=1}^{n} |a_{ij}| $$| 范数类型 | 定义 | 性质 | 优化难度 | 用途 |
|---|---|---|---|---|
| $L_0$ | $\sum_{i,j} \mathbb{I}(a_{ij} \neq 0)$ | 非凸、离散、不连续 | NP难 | 精确稀疏性控制 |
| $L_1$ | $\sum_{i,j} | a_{ij} | $ | 凸、连续 |
矩阵的核范数
核范数,又称为迹范数(trace norm),是矩阵范数的一种,定义为矩阵所有奇异值之和。对于一个矩阵 $A$(假设其奇异值为 $\sigma_1, \sigma_2, \dots, \sigma_r$),其核范数定义为:
$$ \|A\|_* = \sum_{i=1}^{r} \sigma_i, $$ 其中 $r$ 是矩阵 $A$ 的秩。核范数的主要特点
-
凸性
- 核范数是一个凸函数,因此在优化问题中常用作替代矩阵秩的惩罚项(因为直接最小化矩阵秩是一个NP困难的问题)。
-
低秩逼近
- 在矩阵补全、低秩矩阵恢复等应用中,核范数被用来鼓励矩阵解具有低秩性质,因其是矩阵秩的凸松弛。
-
与SVD的关系
- 核范数直接依赖于矩阵的奇异值,计算时通常需要奇异值分解(SVD)。
Frobenius 范数
对于一个矩阵 $A \in \mathbb{R}^{m \times n}$,其 Frobenius 范数定义为
$$ \|A\|_F = \sqrt{\sum_{i=1}^{m}\sum_{j=1}^{n} a_{ij}^2} $$这个定义与向量 $L2$ 范数类似,只不过是对矩阵中所有元素取平方和后再开平方。
对于归一化的向量$\mathbf{x}_m$ ,其外积矩阵 $\mathbf{x}_m \mathbf{x}_m^T$,其元素为 $(\mathbf{x}_m \mathbf{x}m^T){ij} = x_i x_j$,因此:
$$ \|\mathbf{x}_m \mathbf{x}_m^T\|_F = \sqrt{\sum_{i=1}^n \sum_{j=1}^n |x_i x_j|^2 } = \sqrt{\left( \sum_{i=1}^n x_i^2 \right) \left( \sum_{j=1}^n x_j^2 \right) } = \|\mathbf{x}_m\|_2 \cdot \|\mathbf{x}_m\|_2 = 1. $$例:
设归一化向量 $\mathbf{x} = \begin{bmatrix} \frac{1}{\sqrt{2}} \ \frac{1}{\sqrt{2}} \end{bmatrix}$,其外积矩阵为:
$$ \mathbf{x} \mathbf{x}^T = \begin{bmatrix} \frac{1}{\sqrt{2}} \\ \frac{1}{\sqrt{2}} \end{bmatrix} \begin{bmatrix} \frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \end{bmatrix} = \begin{bmatrix} \frac{1}{2} & \frac{1}{2} \\ \frac{1}{2} & \frac{1}{2} \end{bmatrix} $$ 计算 Frobenius 范数: $$ \|\mathbf{x} \mathbf{x}^T\|_F = \sqrt{ \left( \frac{1}{2} \right)^2 + \left( \frac{1}{2} \right)^2 + \left( \frac{1}{2} \right)^2 + \left( \frac{1}{2} \right)^2 } = \sqrt{4 \cdot \frac{1}{4}} = 1. $$如果矩阵 $A$ 的奇异值为 $\sigma_1, \sigma_2, \ldots, \sigma_n$,则:
$$ \|A\|_F = \sqrt{\sum_{i=1}^n \sigma_i^2} $$这使得 Frobenius 范数在低秩近似和矩阵分解(如 SVD)中非常有用。
设矩阵 $A$ 为:
$$ A = \begin{bmatrix} 1 & 0 \\ 0 & 2 \\ 1 & 1 \end{bmatrix} $$定义:
$$ \|A\|_F = \sqrt{1^2 + 0^2 + 0^2 + 2^2 + 1^2 + 1^2 } = \sqrt{1 + 0 + 0 + 4 + 1 + 1} = \sqrt{7} $$ 验证:-
计算 $A^T A$: $$ A^T A = \begin{bmatrix} 1 & 0 & 1 \ 0 & 2 & 1 \end{bmatrix} \begin{bmatrix} 1 & 0 \ 0 & 2 \ 1 & 1 \end{bmatrix} = \begin{bmatrix} 2 & 1 \ 1 & 5 \end{bmatrix} $$
-
求 $A^T A$ 的特征值(即奇异值的平方): $$ \det(A^T A - \lambda I) = \lambda^2 - 7\lambda + 9 = 0 \implies \lambda = \frac{7 \pm \sqrt{13}}{2} $$ 因此: $$ \sigma_1 = \sqrt{\frac{7 + \sqrt{13}}{2}}, \quad \sigma_2 = \sqrt{\frac{7 - \sqrt{13}}{2}} $$
-
验证 Frobenius范数: $$ \sigma_1^2 + \sigma_2^2 = \frac{7 + \sqrt{13}}{2} + \frac{7 - \sqrt{13}}{2} = 7 $$ 所以: $$ |A|_F = \sqrt{7} $$
公式正确!
迹和 Frobenius 范数的关系:
$$ \|A\|_F^2 = \text{tr}(A^* A) $$ 这表明 Frobenius 范数的平方就是 $A^* A$ 所有特征值之和。而 $A^* A$ 的特征值开方就是A的奇异值。最大范数
矩阵的最大范数(也称为 元素级无穷范数 或 一致范数)定义为矩阵所有元素绝对值的最大值:
$$ \|A\|_{\max} = \max_{i,j} |A_{ij}| $$它衡量的是矩阵中绝对值最大的元素,适用于逐元素(element-wise)分析。
如果比较两个矩阵 $A$ 和 $B$,它们的误差矩阵 $E = A - B$ 的最大范数为:
$$ \|A - B\|_{\max} = \max_{i,j} |A_{ij} - B_{ij}| $$意义:
- 如果 $|A - B|_{\max} \leq \epsilon$,说明 $A$ 和 $B$ 的所有对应元素的误差都不超过 $\epsilon$。
对于任意 $m \times n$ 的矩阵 $A$,以下不等式成立:
$$ \|A\|_{\max} \leq \|A\|_F \leq \sqrt{mn} \cdot \|A\|_{\max} $$矩阵的迹
迹的定义
对于一个 $n \times n$ 的矩阵 $B$,其迹(trace)定义为矩阵对角线元素之和:
$$ \text{tr}(B) = \sum_{i=1}^n B_{ii} $$迹与特征值的关系
对于一个 $n \times n$ 的矩阵 $B$,其迹等于其特征值之和。即:
$$ \text{tr}(B) = \sum_{i=1}^n \lambda_i $$其中 $\lambda_1, \lambda_2, \ldots, \lambda_n$ 是矩阵 $B$ 的特征值。
应用到 $A^ A$*
对于矩阵 $A^* A$(如果 $A$ 是实矩阵,则 $A^* = A^T$),它是一个半正定矩阵,其特征值是非负实数。
$A^* A$ 的迹还与矩阵 $A$ 的 Frobenius 范数有直接关系。具体来说:
$$ \|A\|_F^2 = \text{tr}(A^* A) $$迹的基本性质
迹是一个线性运算,即对于任意标量 $c_1, c_2$ 和矩阵 $A, B$,有:
$$ \text{tr}(c_1 A + c_2 B) = c_1 \text{tr}(A) + c_2 \text{tr}(B) $$对于任意矩阵 $A, B, C$,迹满足循环置换性质:
$$ \text{tr}(ABC) = \text{tr}(CAB) = \text{tr}(BCA) $$注意:迹的循环置换性不意味着 $\text{tr}(ABC) = \text{tr}(BAC)$,除非矩阵 $A, B, C$ 满足某些特殊条件(如对称性)。
酉矩阵
酉矩阵是一种复矩阵,其满足下面的条件:对于一个 $n \times n$ 的复矩阵 $U$,如果有
$$ U^* U = U U^* = I, $$其中 $U^*$ 表示 $U$ 的共轭转置(先转置再取复共轭),而 $I$ 是 $n \times n$ 的单位矩阵,那么 $U$ 就被称为酉矩阵。简单来说,酉矩阵在复内积空间中保持内积不变,相当于在该空间中的“旋转”或“反射”。
如果矩阵的元素都是实数,那么 $U^*$ 就等于 $U^T$(转置),这时酉矩阵就退化为正交矩阵。
考虑二维旋转矩阵
$$ U = \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{bmatrix}. $$当 $\theta$ 为任意实数时,这个矩阵满足
$$ U^T U = I, $$所以它是一个正交矩阵,同时也属于酉矩阵的范畴。
例如,当 $\theta = \frac{\pi}{4}$(45°)时,
$$ U = \begin{bmatrix} \frac{\sqrt{2}}{2} & -\frac{\sqrt{2}}{2} \\ \frac{\sqrt{2}}{2} & \frac{\sqrt{2}}{2} \end{bmatrix}. $$正定\正半定矩阵
-
正定矩阵(PD)
$$ A \text{ 正定} \iff \forall, x \in \mathbb{R}^n \setminus {0}, \quad x^T A x > 0. $$ -
正半定矩阵(PSD)
$$ A \text{ 正半定} \iff \forall, x \in \mathbb{R}^n, \quad x^T A x \ge 0. $$
-
PD:所有特征值都严格大于零。
$\lambda_i(A)>0,;i=1,\dots,n$。 -
PSD:所有特征值都非负。
$\lambda_i(A)\ge0,;i=1,\dots,n$。
拉普拉斯矩阵是正半定矩阵!
对于任意实矩阵 $A$(大小为 $m\times n$),矩阵 $B = A^T A\quad(\text{大小为 }n\times n).$是半正定矩阵
-
显然
$$ B^T = (A^T A)^T = A^T (A^T)^T = A^T A = B, $$ 所以 $B$ 是对称矩阵。 -
对任意向量 $x\in\mathbb R^n$,有
$$ x^T B,x = x^T (A^T A) x = (Ax)^T (Ax) = |Ax|^2 ;\ge;0. $$ 因此 $B$ 总是 正半定(PSD) 的。
对称非负矩阵分解
$$ A≈HH^T $$1. 问题回顾
给定一个对称非负矩阵 $A\in\mathbb{R}^{n\times n}$,我们希望找到一个非负矩阵 $H\in\mathbb{R}^{n\times k}$ 使得
$$ A \approx HH^T. $$ 为此,我们可以**最小化目标函数(损失函数)** $$ f(H)=\frac{1}{2}\|A-HH^T\|_F^2, $$ 其中 $\|\cdot\|_F$ 表示 Frobenius 范数,定义为矩阵所有元素的平方和的平方根。$| A - H H^T |_F^2$ 表示矩阵 $A - H H^T$ 的所有元素的平方和。
2. 梯度下降方法
2.1 计算梯度
目标函数(损失函数)是
$$ f(H)=\frac{1}{2}\|A-HH^T\|_F^2. $$ $$ \|M\|_F^2 = \operatorname{trace}(M^T M), $$因此,目标函数可以写成:
$$ f(H)=\frac{1}{2}\operatorname{trace}\Bigl[\bigl(A-HH^T\bigr)^T\bigl(A-HH^T\bigr)\Bigr]. $$注意到 $A$ 和$HH^T$ 都是对称矩阵,可以简化为:
$$ f(H)=\frac{1}{2}\operatorname{trace}\Bigl[\bigl(A-HH^T\bigr)^2\Bigr]. $$展开后得到
$$ f(H)=\frac{1}{2}\operatorname{trace}\Bigl[A^2 - 2AHH^T + (HH^T)^2\Bigr]. $$其中 $\operatorname{trace}(A^2)$ 与 $H$ 无关,可以看作常数,不影响梯度计算。
计算 $\nabla_H \operatorname{trace}(-2 A H H^T)$
$$ \nabla_H \operatorname{trace}(-2 A H H^T) = -4 A H $$计算 $\nabla_H \operatorname{trace}((H H^T)^2)$
$$ \nabla_H \operatorname{trace}((H H^T)^2) = 4 H H^T H $$将两部分梯度合并:
$$ \nabla_H f(H) = \frac{1}{2}(4 H H^T H - 4 A H )= 2(H H^T H - A H) $$2.2 梯度下降更新
设学习率为 $\eta>0$,则梯度下降的基本更新公式为:
$$ H \leftarrow H - \eta\, \nabla_H f(H) = H - 2\eta\Bigl(HH^T H - A H\Bigr). $$由于我们要求 $H$ 中的元素保持非负,所以每次更新之后通常需要进行投影:
$$ H_{ij} \leftarrow \max\{0,\,H_{ij}\}. $$这种方法称为投影梯度下降,保证每一步更新后 $H$ 满足非负约束。
3. 举例说明
设对称非负矩阵:
$$ A = \begin{bmatrix} 2 & 1 \\ 1 & 2 \end{bmatrix}, \quad k=1, \quad H \in \mathbb{R}^{2 \times 1} $$ 初始化 $H^{(0)} = \begin{bmatrix} 1 \\ 1 \end{bmatrix}$,学习率 $\eta = 0.01$。迭代步骤:
- 初始 ( H^{(0)} ):
目标函数值:
$$ f(H^{(0)}) = \frac{1}{2} \left( (2-1)^2 + 2(1-1)^2 + (2-1)^2 \right) = 1. $$- 计算梯度:
- 更新 ( H ):
- 更新后目标函数:
一次迭代后目标函数值从 $1.0$ 下降至 $0.8464$